Robotic Radiation Monitoring System
robot-hero.jpg
radiation-system.jpg
heatmap.png
dashboard.png
Overview
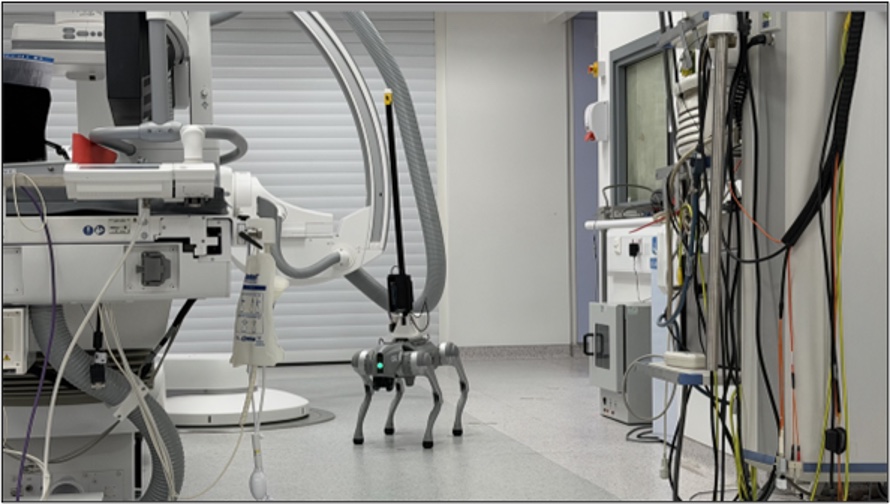
Developed a Unitree Go2-based robotic radiation monitoring prototype designed to support remote, safety-oriented surveys in compact clinical X-ray environments. The system combines a custom sensing payload, real-time telemetry, waypoint-based movement, and 2D/3D heatmap generation, with testing focused on workflow feasibility, signal integrity, and comparison against clinical-grade dosimetry hardware.
What was developed
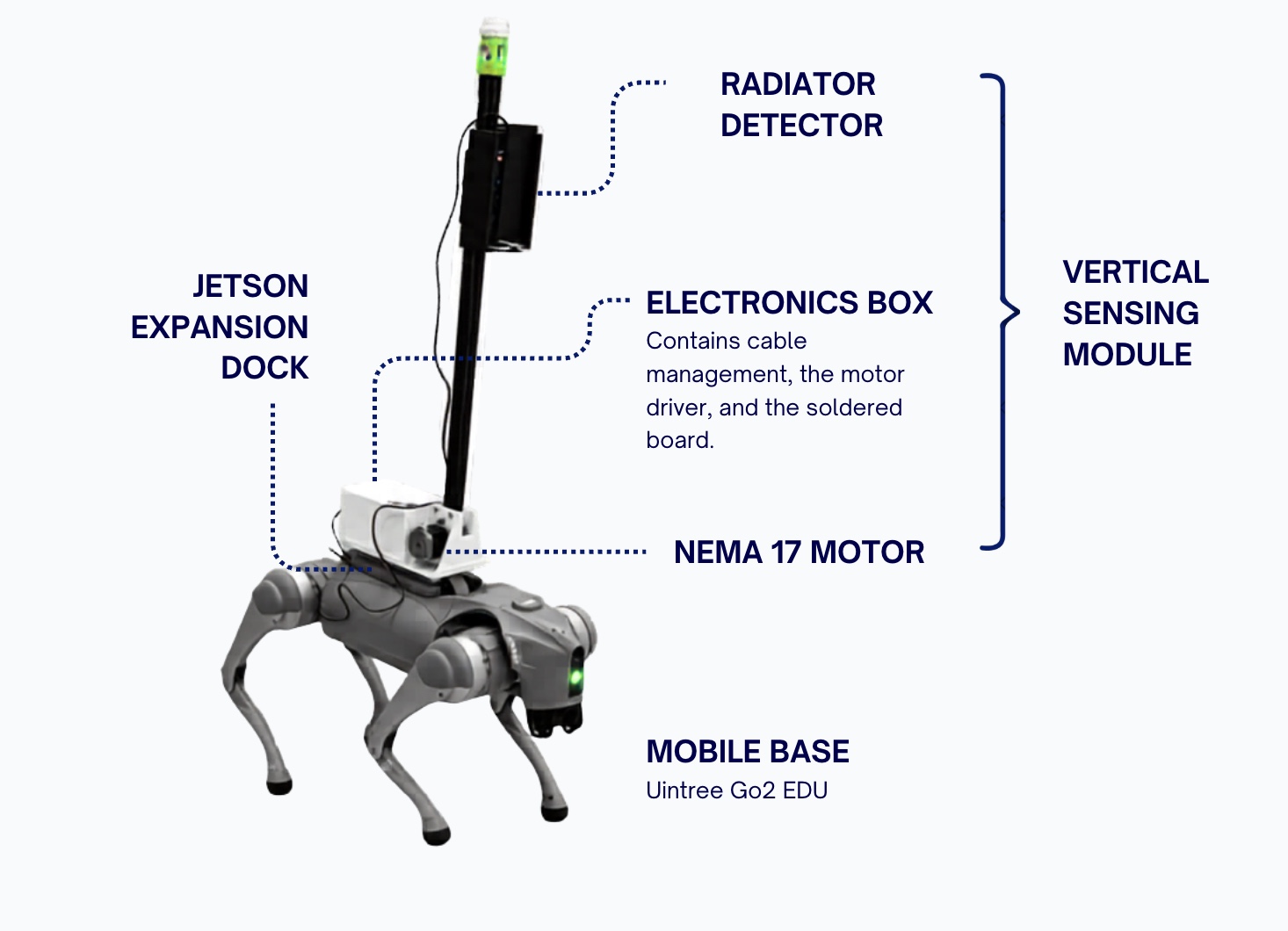
- Integrated a Unitree Go2 quadruped platform with a custom radiation sensing payload.
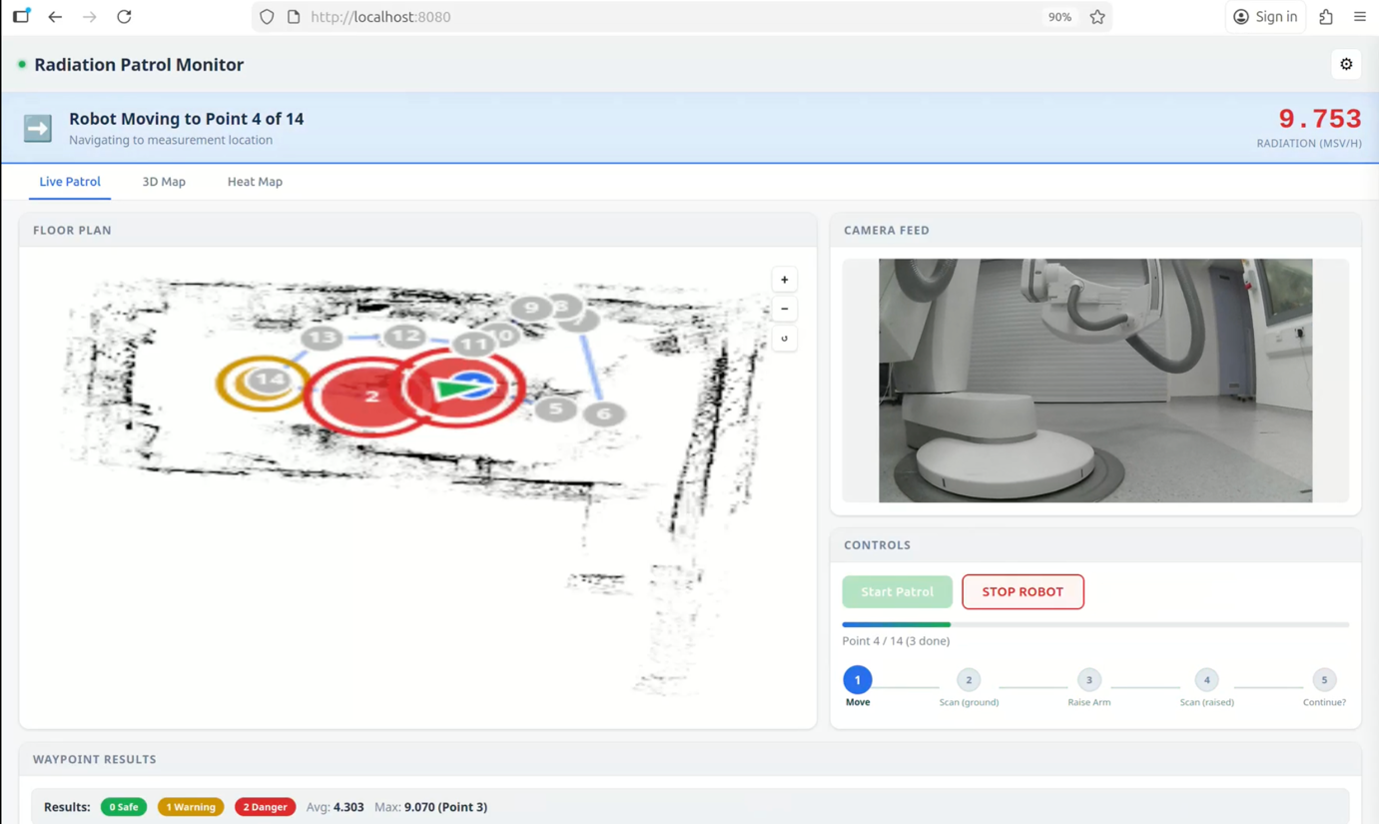
- Developed a real-time telemetry workflow between the robot and workstation.
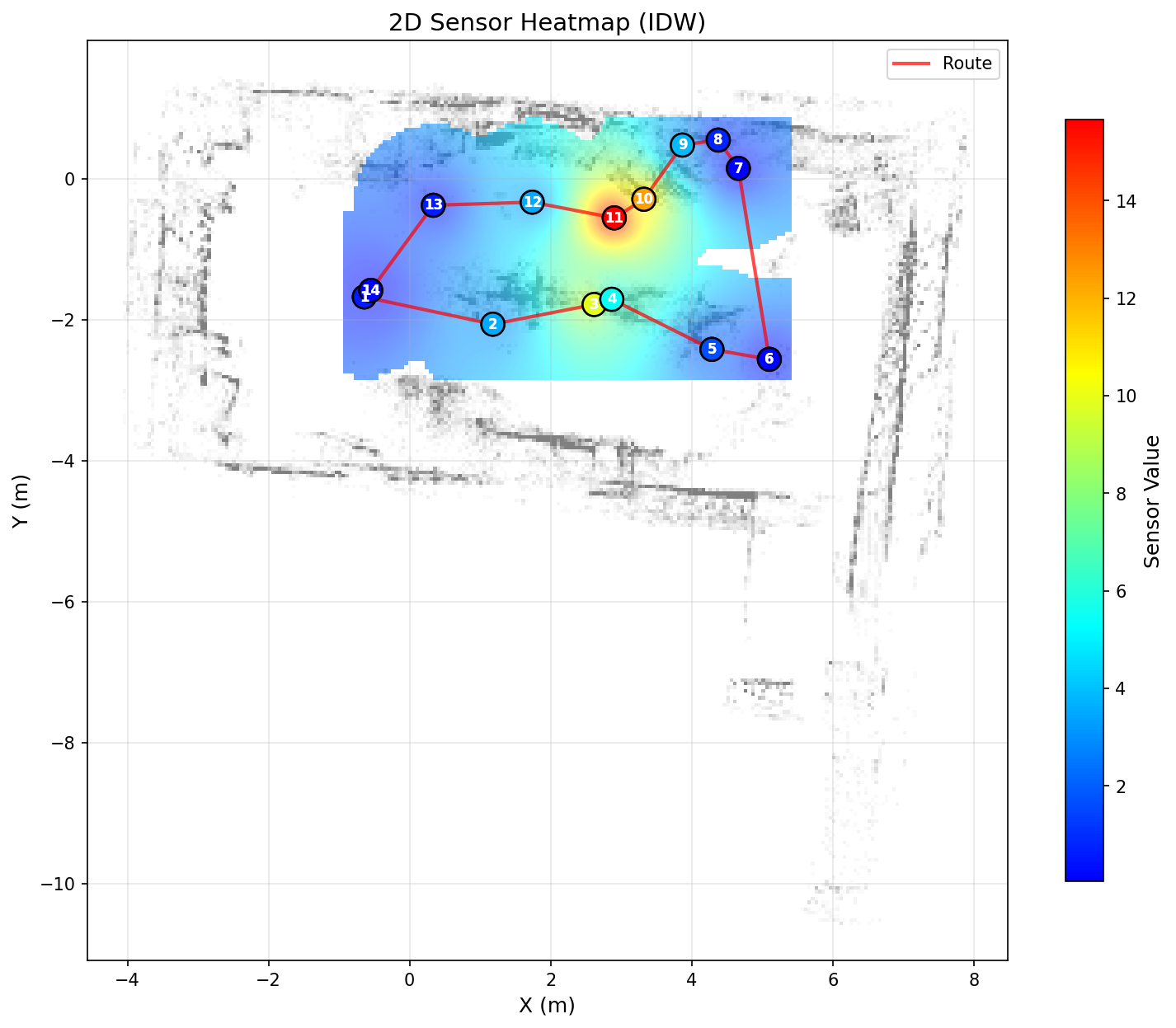
- Generated 2D and 3D radiation heatmaps for spatial visualisation.
- Implemented structured Excel / CSV data export for analysis and audit support.
- Cross-validated sensor readings against clinical-grade dosimetry hardware.
- Investigated EMI and signal integrity challenges during robotic integration.
- Designed the system around remote supervision and safety-oriented monitoring.
Prototype demonstration
Key technical highlights
- Unitree Go2 robotic platform
- Custom radiation sensing payload
- Python SDK integration
- Real-time data pipeline
- 2D / 3D heatmap generation
- Clinical-grade dosimetry cross-validation
- EMI troubleshooting
- Safety-oriented operator workflow
Tools and skills
Python, Unitree Go2, radiation sensing, telemetry, data visualisation, 2D/3D heatmaps, validation workflow, clinical engineering, and system integration.