机器人辐射监测系统
robot-hero.jpg
radiation-system.jpg
heatmap.png
dashboard.png
概览
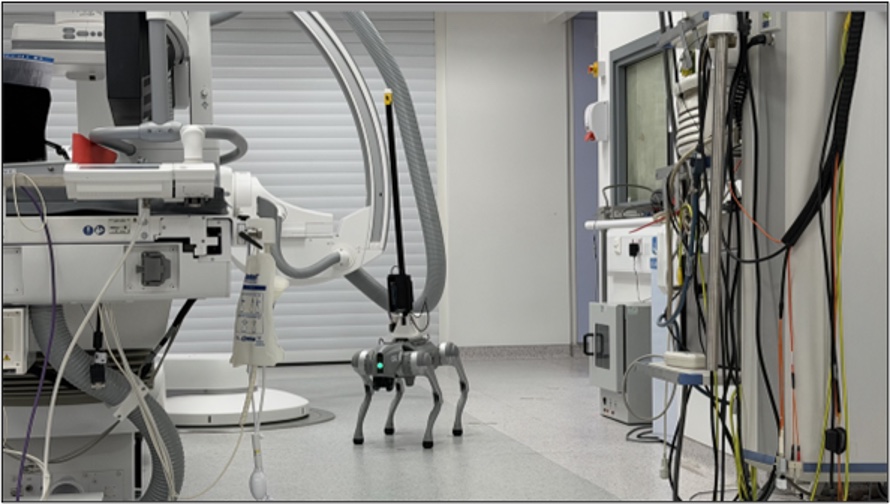
开发以 Unitree Go2 为基础的机器人辐射监测原型,旨在支持狭小临床 X 光环境中的远程安全导向测量。系统整合自订传感载荷、实时遥测、基于航点的移动及 2D/3D 热图生成;测试重点包括工作流程可行性、信号完整性,以及与临床级剂量测量硬件比较。
开发内容
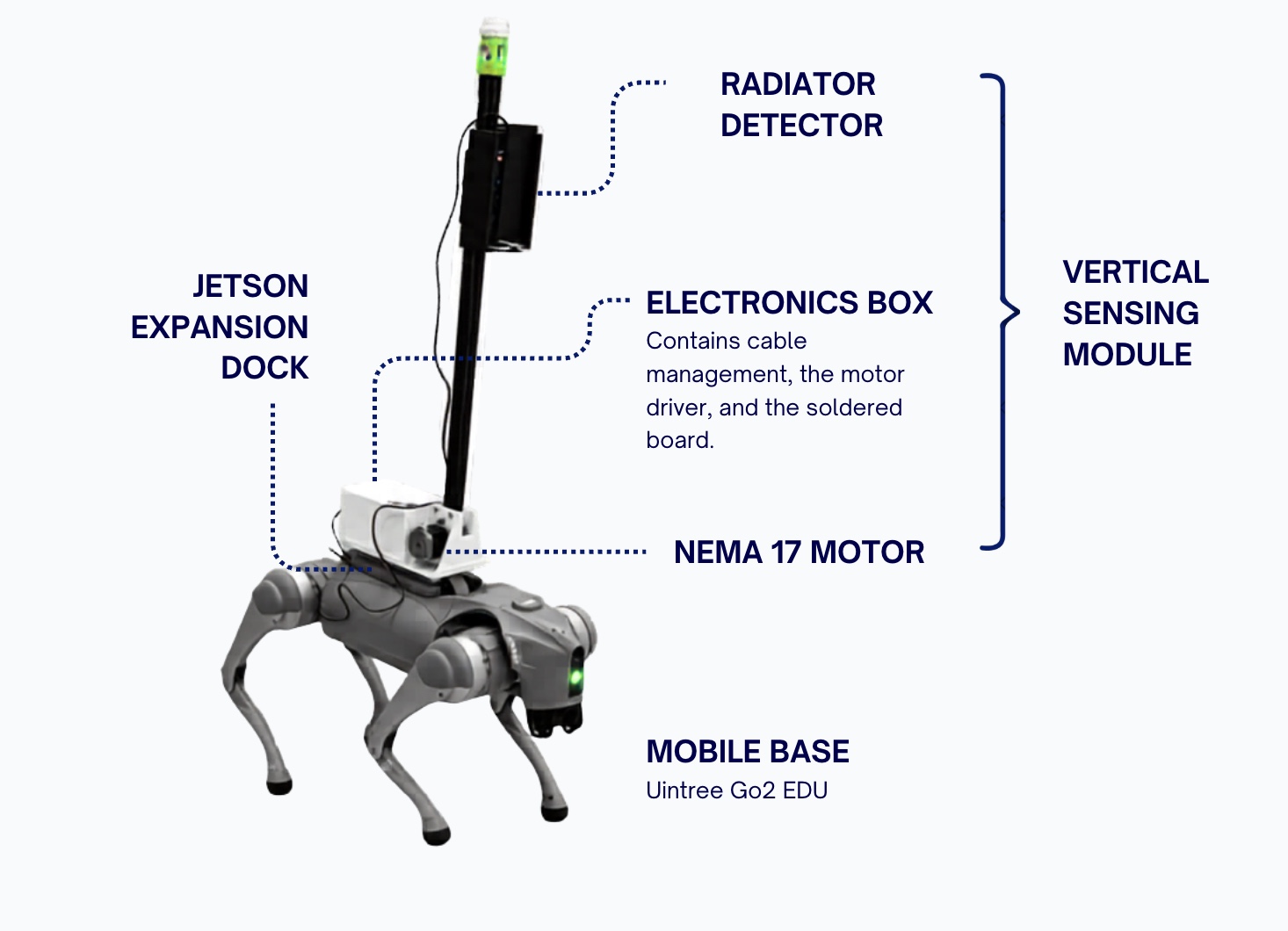
- 将 Unitree Go2 四足机器人平台与自订辐射传感载荷整合。
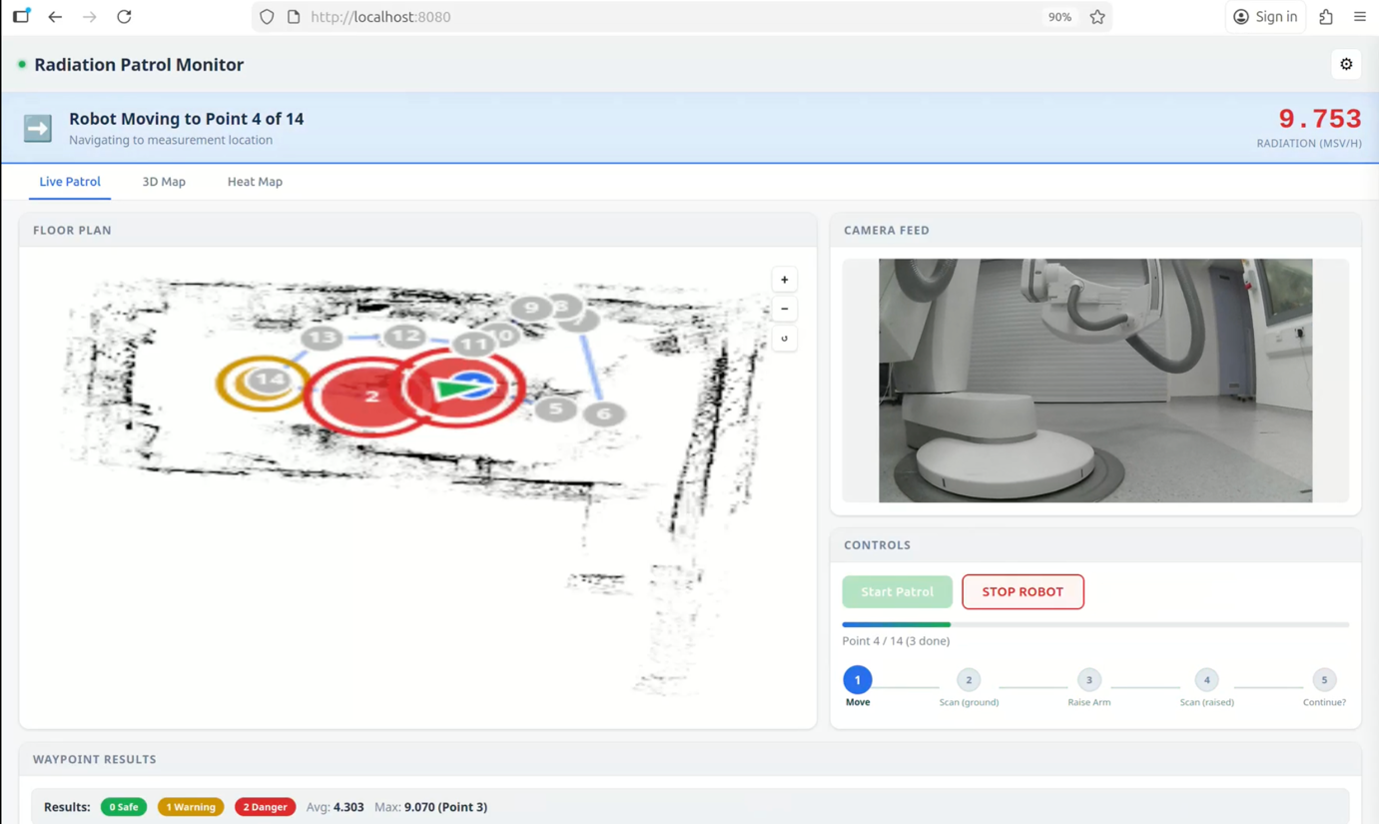
- 建立机器人与工作站之间的实时遥测流程。
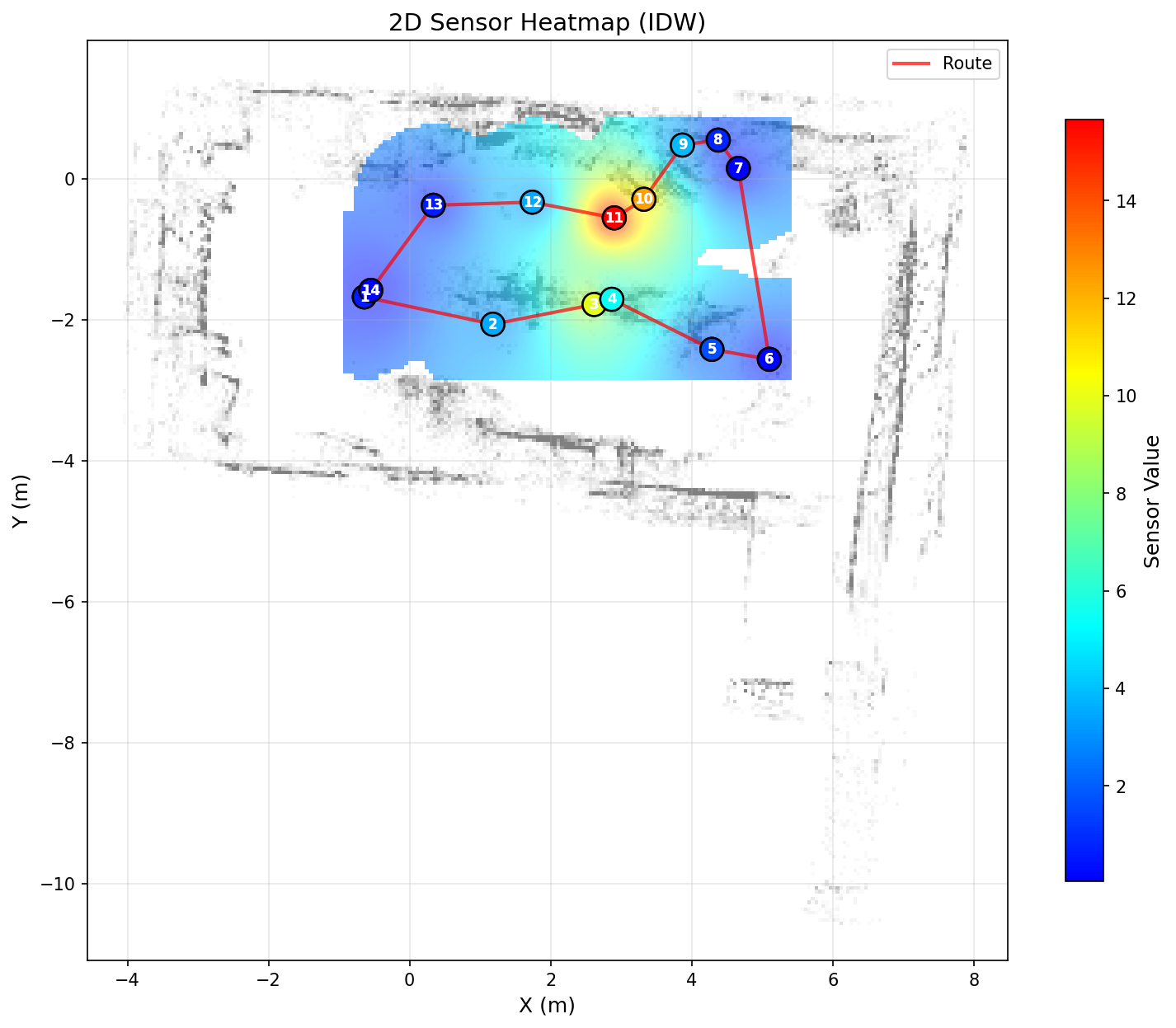
- 生成 2D 及 3D 辐射热图作空间可视化。
- 实现结构化 Excel/CSV 数据导出,以支持分析及审核。
- 将传感器读数与临床级剂量测量硬件交叉验证。
- 研究机器人整合过程中的电磁干扰及信号完整性问题。
- 以远程监督及安全导向监测为核心设计系统。
原型示范
主要技术重点
- Unitree Go2 机器人平台
- 自订辐射传感载荷
- Python SDK 整合
- 实时数据流程
- 2D/3D 热图生成
- 临床级剂量测量交叉验证
- 电磁干扰故障排查
- 安全导向操作流程
工具与技能
Python、Unitree Go2、辐射传感、遥测、数据可视化、2D/3D 热图、验证流程、临床工程及系统整合。